12. File System Implementation
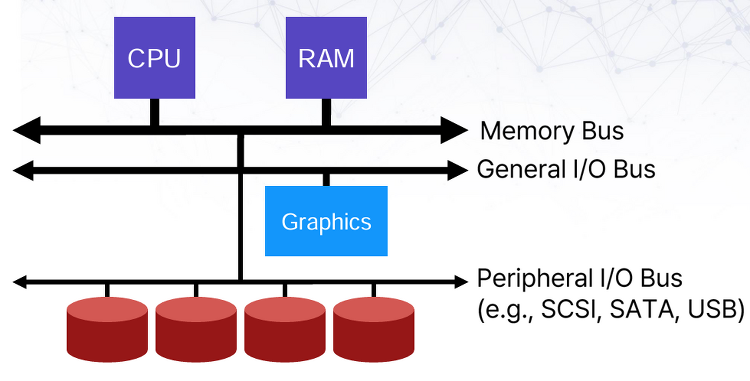
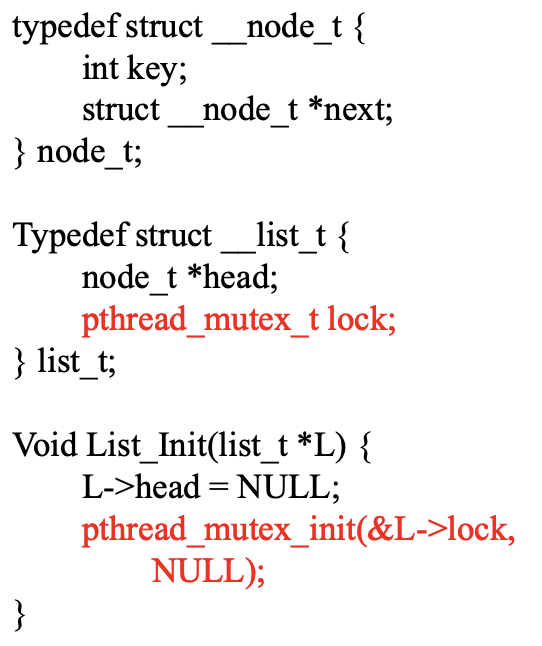
File에는 다음의 정보가 저장되어 있다. Inode number Path File descriptor Inode에는 meta data가 저장되어 있다. Hierarchical으로 구성되어 있다. 빈번하게 path를 검색하는 것을 방지하기 위해서 사용된다. 가령 file descriptor는 다음처럼 사용된다. int fd = open(char *path, int flat, mode_t mode) read(int fd, void *buf, size_t nbyte) write(int fd, void *buf, size_t nbyte) close(int fd) Disk Structure Disk는 large array로 구성되어 있다. Data를 이 array에 잘 mapping하는 것이 주요 포인트이다. ..
2023.12.14